Een verkennende literatuurstudie

Masters of Specialised Physical Therapy (MSPT), Avans+, Breda
Thesis van Erik Akkerman, Overstraat 53, 3958 BS Amerongen, 0343-461482, 06-19520600
info@akkermanmanueeltherapeut.nl
Jeroen Dockx
| Begeleiders: | Intern beoordelaar: | Examencommissie: |
| Jeroen Dockx | Karel Opraus | Drs. Y. Westenberg |
| Margit Kooijman | Prof. R.A.B. Oostendorp |
Totaal Bewegen, feit of fictie?
Een verkennende literatuurstudie
| Inhoud: | |
| Abstract | 3 |
| Samenvatting | 3 |
| Inleiding | 4 |
| Methode | 7 |
| Resultaten | 8 |
| Discussie | 15 |
| Conclusie | 20 |
| Literatuur | 22 |
| Bijlagen | 26 |
Totaal Bewegen, feit of fictie?
Een verkennende literatuurstudie
Abstract
This study provides an overview of the scientific insights from literature on total movement to serve as basis for the subject Manual Therapy E.S. ®. There was searched with the keywords biomechanics, movement, posture, musculoskeletal disease, postural balance, postural chain and focal chain in scientific databases of Pubmed, Medline, Embase and Science Direct
The results were described using a classification in motion chains, postural chains and posture balance. Especially the articles dealing with postural balance give direction to the support of the paradigm total movement in Manual Therapy E.S. ®. Described are anticipatory, synchronous and subsequent postural adjustments. The investigations of linkage of motions also illustrate that motion of one bone influences other parts of the chain motion. The adjustment of position and orientation of the chain as a result of change in the position of one bone also shows that isolated motion of a bone is not possible. The paradigm of total movement as used in Manual Therapy E.S.® as described in the literature may therefore be regarded as conceivable. Maintaining a dynamic balance of all the forces acting within the motion system seems of interest for the biomechanical explanation. Maintenance of the internal equilibrium and the equilibrium relative to the environment (supporting surface) plays the major role. Factors such as support face, body center of gravity, mass, friction forces, external support or surfaces are of influence.
Samenvatting
Deze studie geeft een overzicht van de wetenschappelijke inzichten uit de literatuur over totaal beweging om als onderbouwing te dienen voor het vak Manuele Therapie E.S. ®.Er werd gezocht met de zoektermen biomechanics, movement, posture, musculoskeletal disease, postural balance, postural chain en focal chain in wetenschappelijke databases van Pubmed, Medline, Embase en Science Direct
De resultaten werden beschreven aan de hand van een indeling in bewegingsketens, houdingsketens en houdingsevenwicht. In het bijzonder de artikelen die handelen over houdingsevenwicht geven richting aan de onderbouwing van het paradigma totaal beweging in de Manuele Therapie E.S. ®. Daarin worden anticipatoir, synchrone en opvolgende houdingsaanpassingen beschreven. Ook de onderzoeken naar koppeling van bewegingen illustreren dat beweging van één botstuk, andere delen van de bewegingsketen beïnvloedt. De aanpassing van stand en oriëntatie van de houdingsketen als gevolg van standsverandering van een botstuk tonen ook dat geïsoleerd bewegen van een botstuk niet mogelijk is. Uit de beschreven literatuur kan derhalve het paradigma van de totaalbeweging zoals die gehanteerd wordt in de Manuele Therapie E.S. ® als voorstelbaar beschouwd worden. Bij de biomechanische verklaring lijkt het handhaven van een dynamisch evenwicht van alle binnen het bewegingssysteem werkzame krachten van belang. Handhaving van het interne evenwicht en het evenwicht ten opzichte van de omgeving (steunvlak) speelt de belangrijkste rol. Factoren als steunvlak, lichaamszwaartepunt, massamiddelpunt, wrijvingskrachten, externe steunpunten of –vlakken zijn van invloed.
Keywords: Biomechanics, postural chain, focal chain, (postural) balance
Inleiding
Traagheid is de (natuurkundige) eigenschap van een voorwerp om in rust te blijven of, in een constante, rechtlijnige beweging en wordt uitgedrukt in massa. Het lichaam bestaat uit een systeem van ketens, die gevormd worden door botstukken, gewrichten, spieren en bindweefsel. Op basis van natuurkundige wetmatigheden wordt aangenomen dat beweging van botstukken in het lichaam ontstaat doordat er kracht op wordt uitgeoefend. Een kracht heeft een grootte en een richting. Botten en bewegingsketens in het lichaam zijn verschillend van grootte en vorm en zullen door krachten die er op uitgeoefend worden in beweging komen. Wanneer de richting waarin een kracht aangrijpt niet loodrecht op het botstuk gericht is, wordt een rotatiekracht (moment) uitgeoefend op het botstuk. Wanneer de som van alle krachten en momenten in het bewegingssysteem gelijk is aan nul bestaat er evenwicht. Wat geldt voor het evenwicht binnen het systeem van het lichaam, geldt ook voor het totale lichaam ten opzichte van de omgeving. Als het bewegende botstuk contact maakt met een ander botstuk, zal ook dit in beweging komen. Immers actie is reactie (Newton). De reactieve beweging van het tweede botstuk zal weer worden door gegeven aan het volgende en zo verder. De beweging stopt wanneer een zelfde kracht, maar tegengesteld gericht wordt uitgeoefend op het voorgaande botstuk [1].
In de Manuele Therapie eggshell systeem (E.S.® ) hanteert men het paradigma van de totaal beweging [2] [3]. Omdat volgens dit concept altijd bewogen wordt in meerdere gewrichten en bewegingsketens zou een behandeling in elk geval deze gewrichten en bewegingsketens moeten betreffen. Er kan dus binnen de denkwereld van de Manueel Therapeut E.S.® niet worden volstaan met behandeling van één gewricht of enkele gewrichten. Een duidelijke definitie van het begrip totaal beweging zoals dat door de grondlegger G. van der Bijl sr. werd geïntroduceerd werd nooit geformuleerd. Dit onderzoek is daartoe een eerste aanzet en moet gezien worden als een verkennende review naar de vraag of totaal beweging feit of fictie is. Het zou derhalve gezien kunnen worden als een fundamenteel onderzoek naar een van de grondbeginselen van de Manuele Therapie E.S. ®
In de wetenschappelijke databases is geen literatuur te vinden als gezocht wordt op het begrip “total motion” of “total movement”. Kernbegrippen in de literatuur die verwijzen naar het mogelijk bestaan van totaal bewegen zijn bewegingsketen (focal chain), houdingsketen (postural chain) en houdingsevenwicht (posturalbalance) [4] [5]. In dit artikel wordt de Nederlandse vertaling van deze terminologie gebruikt.
Bewegingsketen:
Een bewegingsketen wordt gevormd door de bewegingselementen die ingezet worden om een doelgerichte beweging tot stand te brengen, bijvoorbeeld het optillen van de arm om iets te pakken [3]. De Cock vergelijkt de bewegingsketen met een tandradsysteem, waarbij beweging van één van de raderen beweging veroorzaakt in alle raderen van het systeem [3]. Abductie van het been geeft bijvoorbeeld via het heupgewricht en het bekken een reactieve beweging van het sacrum in het sacroiliacaal gewricht [6]. De bewegingsketen kan worden gedefinieerd als die delen van het lichaam die worden gebruikt voor het uitvoeren van een willekeurige beweging [4].
Houdingsketen:
Onder houdingsketen wordt verstaan de verzameling van bewegingselementen die niet bij de primaire beweging zijn betrokken, maar die het mogelijk maken de verstoring van het krachtenevenwicht die het gevolg is van deze doelgerichte beweging te compenseren. Voor het uitvoeren van een doelgerichte handeling als het pakken van een glas is het nodig dat de rest van het lichaam zodanig wordt gepositioneerd dat een stabiele situatie ontstaat binnen het gehele bewegingssysteem. Voor het uitstrekken van de arm is het noodzakelijk de rest van het lichaam zo te positioneren dat het totale krachtenspel in het lichaam in evenwicht is [4]. Evenwicht is een toestand waarbij alle optredende invloeden worden geneutraliseerd door andere, resulterend in een stabiel, gebalanceerd of onveranderlijk systeem [7]. Hiervoor is een gecoördineerde actie nodig van alle bewegingselementen die niet betrokken zijn bij de doelgerichte beweging maar het mogelijk maken de verstoring van het krachtenevenwicht, als gevolg van de doelgerichte beweging, te compenseren. Verstoring van de beweging in één gewricht veroorzaakt onmiddellijk een aanpassing van de hele keten, zelfs bij minimale bewegingen als ademhalen [8].
Houdingsevenwicht
Handhaving van het evenwicht ten opzichte van de omgeving staat in direct verband met de hierboven beschreven houdingsketen. Zonder inwerking van de zwaartekracht speelt houdingsevenwicht geen rol [9] (fig. 1) Evenwicht in relatie tot de omgeving bestaat wanneer de resultante van alle op het lichaam inwerkende krachten valt binnen de omtrek van het steunvlak van het lichaam. Om dit te kunnen realiseren dient de lichaamsmassa zich dusdanig te groeperen, dat de loodlijn uit het gemeenschappelijke lichaamszwaartepunt binnen dit steunvlak blijft [2] [3]. De totale lichaamsmassa wordt gevormd door deelmassa’s als onderarm, nek en bekken. Dit geldt uitsluitend in statische situaties. Bij beweging kan het zijn dat de loodlijn uit het lichaamszwaartepunt (tijdelijk) buiten het steunvlak valt. Bijvoorbeeld de valbeweging bij het schaatsen of de startbeweging bij hardlopen (sprinters). Het adequaat richten van krachten in het lichaam is dan van eminent belang [10].
Evenwicht zou onderverdeeld kunnen worden in een drietal soorten [11]. Stabiel evenwicht bestaat wanneer de beweging niet verandert of als er geen beweging is. Labiel evenwicht kan worden beschreven als een toestand die verloren gaat bij iedere erop inwerkende kracht. De zwaartelijn valt direct buiten het steunvlak en kan niet meer worden hersteld. Metastabiel evenwicht wil zeggen dat de evenwichtstoestand bij kleine verstoringen gehandhaafd kan worden, maar dat bij overschrijding van een bepaalde drempelwaarde het oorspronkelijke evenwicht wordt verstoord en er een nieuw evenwicht wordt gevonden. Iets wat in het dagelijks leven veel gebeurd.
Uit inleidend onderzoek voor deze studie zou totaalbeweging gedefinieerd kunnen worden als de eigenschap van het lichaam om, wanneer het in beweging worden gebracht door krachten die uitgeoefend worden op één of meerdere deelmassa’s, de som van krachten en momenten uitgeoefend op deelmassa’s binnen het lichaam zo dicht mogelijk rond nul te handhaven en te streven naar evenwicht ten opzichte van de omgeving, door de loodlijn uit het lichaamszwaartepunt te laten vallen binnen het steunvlak [12].
Het doel van dit onderzoek is een bijdrage te leveren aan de discussie over de theoretische onderbouwing van Manuele Therapie E.S.® en de mogelijke consequenties voor de behandelpraktijk. Door een oriënterend literatuur onderzoek wordt een overzicht gegeven van bestaande kennis op het gebied van totaal bewegen en het bewegen in ketens.
De vraagstelling in dit onderzoek is verdeeld in drie deelvragen en in chronologische volgorde gekoppeld aan de bovenstaande begrippen bewegingsketen, houdingsketen en houdingsevenwicht.
- Welke biomechanische verklaring is er voor aanname dat beweging van een botstuk in één gewricht altijd zal leiden tot beweging in alle gewrichten van de bewegingsketen?
- Om een doelgerichte beweging mogelijk te maken moet de rest van het lichaam zodanig worden gepositioneerd dat de loodlijn uit het lichaamszwaartepunt valt binnen het steunvlak. Is in de literatuur het bestaan van houdingsketens terug te vinden?
- Door het bewegen van een botstuk of gewricht in het menselijk lichaam zal verstoring van de balans binnen het bewegingsapparaat optreden. Hoe wordt deze balansverstoring gecompenseerd bij gezonde personen?
Methode:
De verzameling artikelen waarnaar wordt gerefereerd in deze literatuurstudie is tot stand gekomen door database onderzoek, bijdragen van derden en door controle van referenties in gevonden artikelen.
Overleg met externe deskundigen, een docent en manueel therapeut aan de opleiding voor manuele therapie Utrecht en twee docenten bewegingstechnologie aan de Haagse hogeschool, leverde de inclusiecriteria biomechanica, beweging, houding, bewegingsketen, houdingsketen en houdingsevenwicht op. Geëxcludeerd werden psychomotoriek en ziekten van het bewegingsapparaat.
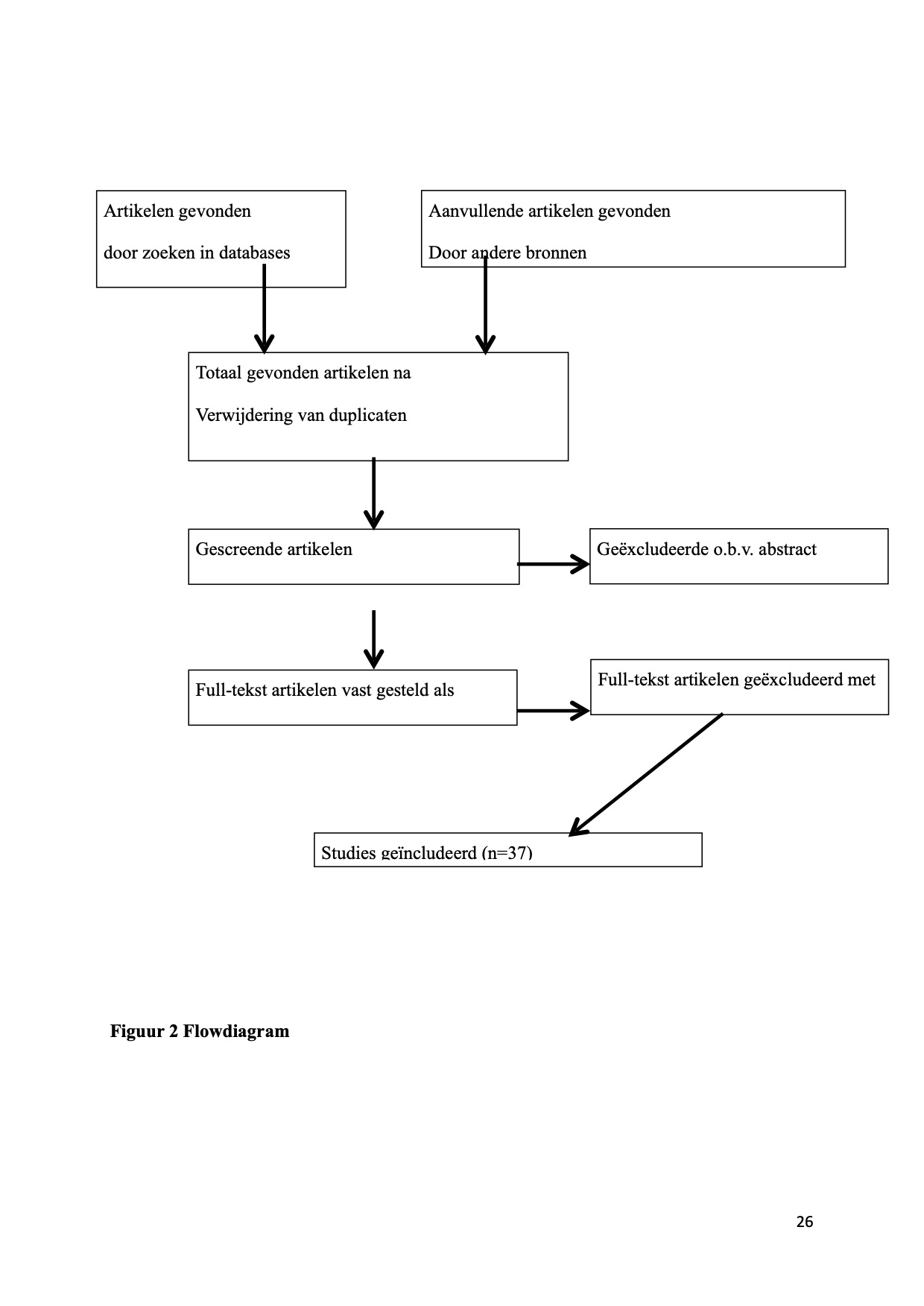
In de periode van februari tot en met mei 2011 werd gezocht in Pubmed, MEDLINE, EMBASE en Science Direct met de zoektermen biomechanics, movement, posture, postural chain, focal chain en postural balance. Omdat het onderzoek gericht is op menselijk bewegen werd de limitering humans ingevoerd. Er wordt voor een limitering tot 10 jaar besloten om de meest actuele informatie te selecteren. Aan de hand van referenties in geselecteerde artikelen werd een enkel ouder relevant artikel toegevoegd. Zie figuur 2.
De gevonden artikelen werden gewaardeerd op basis van de CBO indeling van methodologische kwaliteit van individuele studies [12]. Beoordeeld werd of relevantie en doel van het onderzoek, onderzoeksmethode en –techniek, selectie van deelnemers, verzamelen van data, analyse van data, beschrijving van het theoretisch referentiekader en beschrijving van uitkomsten en conclusies van de artikelen voldoende is (CBO, 2007). Per onderwerp werden 2 punten toegekend bij voldoende beoordeling, 1 punt bij twijfel en 0 punten als de beoordelaar het item als onvoldoende beoordeelt (Bijlage 1). Er kunnen minimaal 0 en maximaal 16 punten worden gescoord. Bij een score van minder dan 10 punten werden artikelen als onvoldoende beoordeeld. Van 10 tot 12 punten was matig en van 12 tot 14 punten voldoende. Bij 15 of 16 punten was de beoordeling goed. Steekproefsgewijs werden een aantal artikelen onafhankelijk van elkaar beoordeeld door twee beoordelaars. Wanneer de waardering meer dan 4 punten uiteen liep werd een derde beoordelaar ingeschakeld.
Resultaten
De combinatie van de zoektermen leverde 234 hits op, waarvan 64 relevant op basis van abstract. Uiteindelijk werden op basis van de volledige tekst 37 artikelen geïncludeerd (fig. 2). Alle artikelen scoorden voldoende tot goed, met uitzondering van Bouisset en Zattara 1981 [13], dat matig (10 punten) werd beoordeeld. De gemiddelde score was 14,58, minimum 10 maximum 16 (bijlage 1)
Binnen de gevonden literatuur kan een indeling gemaakt worden in drie verschillende categorieën. Artikelen die de onderlinge verbondenheid beschrijven tussen een aantal botstukken en gewrichten (bewegingsketen), artikelen die beschrijven hoe de oriëntatie van een deel van de bewegingsketen de vorm en oriëntatie van het geheel beïnvloeden (houdingsketen) en beschrijving in artikelen van houdingsaanpassingen bij uitvoering van doelgerichte bewegingen (houdingsevenwicht). De resultaten worden beschreven aan de hand van deze indeling.
- Artikelen die de onderlinge verbondenheid beschrijven tussen een aantal botstukken en gewrichten (bewegingsketen):
Een bewegingsketen zorgt voor het maken van een doelgerichte beweging, zoals het heffen van een arm of been, vooroverbuigen van de romp of lopen. Een aantal van deze bewegingsketens zijn onderzocht en beschreven. Takasaki et al. 2009, Fayad et al. 2008 en Theodoris & Ruston 2002 beschreven de relatie tussen het bewegen van de arm en beweging in de wervelkolom. Zij vonden allen dat bij beweging van de arm er eveneens beweging werd gevonden in de cervicale wervelkolom, de thoracale wervelkolom of de thorax [14] [15] [16]. Het onderzoek van Theodoris & Ruston 2002 scoorde matig op beschrijving van theoretisch kader en relevantie, maar de uitkomsten zijn wel in overeenstemming met de beide andere artikelen, die wel goed beoordeeld werden.
Tully et al. 2005, Kuo et al. 2010, Pal et al. 2007 en Milosavljevic et al. 2008, onderzochten de koppeling tussen bewegingen van heup en wervelkolom. Bij opstaan vanuit zit, heffen van een been in stand en bij extenderen van de wervelkolom blijkt beweging op te treden in zowel de heup, als lumbale en thoracale wervelkolom [17] [18] [19] [20]. Alle artikelen scoren voldoende tot goed, hoewel bij Kuo enige twijfel is over de relevantie, de gebruikte methode en de selectie van proefpersonen. De resultaten van het onderzoek zijn echter in lijn met de andere artikelen. Ook bij het onderzoek van Nott et al. 2010 wordt de relevantie niet duidelijk beschreven en is er twijfel over de manier van selecteren van proefpersonen. Er werd een relatie gevonden tussen bewegingen van individuele gewrichten en de romp gedurende het gaan. Het laat zien dat de enkel, knie en heup bewegingen allen de hoekversnelling van de romp beïnvloeden [21]. Bussey et al. 2009 vond bij gezonde proefpersonen door abduceren, exoroteren en een combinatie van abductie met exorotatie van het femur beweging van het sacroiliacaal gewricht [6]. Er bestaat enige twijfel aan de gebruikte techniek en de dataverzameling, maar de totaalscore is voldoende. In combinatie met het onderzoek van Scholtes et al. 2009, die constateerden dat bij knieflexie en heupabductie, beweging optreedt in bekken en lumbale wervelkolom [22] wordt verondersteld dat er ook beweging zal optreden in het sacroiliacaalgewricht bij beweging van het femur. De gemiddelde score van dit onderzoek is voldoende. Li et al. 2009 deden een goed beoordeeld onderzoek naar de bewegingsomvang van de lumbale wervelkolom. Zij vonden verschillende bewegingsuitslagen op diverse wervelniveaus. Niet elk wervelsegment levert dus een gelijke bijdrage aan de totale bewegingsomvang [23].
Shan & Westerhof 2005 en Naito et al. 2010 deden onderzoek naar de meervoudige gewrichtsketen beweging bij de voetbal wreeftrap. Naito bestudeerde zowel de invloed van het schoppende been, als het aandeel van romp en standbeen, op de effectiviteit van de trap. Aan de hand van een model werd de kniebeweging ontleed in verschillende factoren; gyroscopisch moment, centrifugale kracht, Coriolis kracht, zwaartekracht, lineaire versnelling en van externe krachten afhankelijke voorwaarden. Hoewel dit onderzoek zich vooral richt op het ontrafelen van de dynamica van de effectieve wreeftrap geeft het een fraai inzicht in de complexiteit van deze beweging. Positie en rotatie van de romp, plaatsing van het standbeen, het moment van start van de schoppende beweging van het been, de maximale knieflexie die correspondeert met het begin van de extensie van de schopbeweging, maximale hoeksnelheid van de heupflexie en van de knie extensie van het schoppende been. De bijdrage van de centrifugaal kracht van het schoppende been was met 151,6% het grootst. Rompspierrotatie met 57,9%, Corioliskracht 56,4% en romp gyroscopisch effect 55,9% leverden ook een belangrijk aandeel aan de hoekversnelling die leidt tot de kracht waarmee de voet de bal raakt. Daarentegen produceren knie extensie/flexie (-84,4%), centrifugaal rotatie van de romp (-65,5%) en gyroscopisch effect van het schoppende been (-58,7%) allen een negatief (!) effect op de kracht van de schop.
Er kan gesteld worden dat gewrichts- en segmentale bewegingen het gevolg zijn van geproduceerde momenten tijdens het schoppen. In het gekoppelde segmenten systeem wordt de gewrichtsbeweging niet alleen bepaald door de momenten om de corresponderende gewrichtsassen, maar ook door de interactie als gevolg van andere gewrichtsrotaties en externe krachten die werken op het systeem. Het onderzoek legt verband tussen gewrichtsbeweging en de beweging veroorzakende musculaire componenten in standbeen, romp en schietbeen. De romp is niet direct gekoppeld aan het dijbeen, dus er is een indirecte dynamische koppeling. Het systeem maakt bij de bewegingsafhankelijke momenten onderscheid tussen Coriolis, gyroscopische en centrifugale krachten. Centrifugaal kracht hangt grotendeels af van gewrichtshoeksnelheid en gewrichtshoek. Coriolis en gyroscopische krachten van hoeksnelheden en hoeken van meerdere gewrichten Omdat gyroscopisch effect niet optreedt in een vlak (planair) systeem moet er driedimensionale beweging zijn bij schopbewegingen. Om een succesvolle schopbeweging te maken zijn verschillende taken nodig, zoals bescherming voor overstrekking van de knie, controle over de gehele oriëntatie van het schoppende been door de heup ab- en adductoren en stabilisatie van het standbeen (Naito, Fukui, & Maruyama, 2010).
In het onderzoek van Shan G, 2005 wordt dezelfde voetbal trap bestudeerd, maar daarbij wordt nadrukkelijk ook de invloed van de romp op de effectiviteit van de schopbeweging beschreven Een effectieve voetbaltrap maakt gebruikt van het totale lichaam (full-body) en multi-gewrichts coördinatie. De beweging wordt beschreven als het maken van een spanningsboog en het snel loslaten van de boog als een soort zweepslag van het been tegen de bal. De boog wordt gespannen door: maximale extensie van de heup aan de schopzijde, romp rotatie naar de niet-schop zijde en extensie en abductie van de schouder aan de kant van het niet-schoppende been en losgelaten door flexie van de heup aan de schopzijde, flexie van het bovenlijf en rotatie naar de kant van het schoppende been. Flexie en adductie van de schouder aan de niet-schoppende zijde. De afstand tussen de niet-schoppende schouderzijde en de heup van het schoppende been blijkt een maat te zijn voor het onderscheiden van de kwaliteit van de wreeftrap (Shan & Westerhof, 2005). Wanneer deze beide onderzoeken bij elkaar genomen worden ontstaat een beeld van totaal beweging bij deze activiteit. Beide artikelen scoren maximaal op methodologische kwaliteit [24] [25]. (Tabel 1)
Alle onderzoeken tonen een interactie tussen de verschillende bewegingscomponenten in de onderzochte gebieden. De begrenzingen van de gebieden verschilt per onderzoeker. Ook de gehanteerde methodes zijn niet uniform. Er zijn geen onderzoeken gevonden die het bestaan van bewegingsketens ontkennen. Geen enkel onderzoek beschrijft een interactie tussen alle bewegingscomponenten.
- Artikelen die beschrijven hoe de oriëntatie van een deel van de bewegingsketen de vorm en oriëntatie van het geheel beïnvloeden (houdingsketen):
Verschillende onderzoekers hebben de invloed onderzocht van stand en oriëntatie van delen van het bewegingsapparaat op de stand en oriëntatie (de houding) van het lichaam (tabel 2). Berthonnaud et al. 2005 deden onderzoek door middel van laterale röntgenopnames van heupen, bekken, lumbale, thoracale en cervicale wervelkolom bij gezonde proefpersonen, waarbij gekeken werd naar de vorm en de oriëntatie van de verschillende delen van bekken en wervelkolom. Er bestaat twijfel over de selectie van proefpersonen. Er bleek een duidelijke connectie tussen bekken, wervelkolom en hoofd. Vorm en oriëntatie van de afzonderlijke segmenten waren aan elkaar gekoppeld, waardoor met zo min mogelijk energie een stabiele situatie kon worden bereikt. Verandering op één niveau gaf verandering van alle segmenten [26]. Ook Labelle et al. 2005 beschouwden de relatie tussen bewegingscomponenten van het lichaam als sterk aan elkaar gerelateerd, waarbij de segmenten van het lichaam beschouwd konden worden als een keten, die bekken en hoofd met elkaar verbindt. Verandering in een deel van de keten beïnvloedde de andere delen van de keten in hun oriëntatie ten opzichte van elkaar [27]. Het artikel scoorde goed bij beoordeling. Pasha et al. 2010 onderzochten de relatie tussen bekkenstand en vorm van scoliose bij adolescenten met en zonder scoliose. Verandering in één vlak beïnvloedde ook beide andere. De meerderheid van de beide scoliose groepen vertoonden een naar de hoofdcurve gerichte rotatie van het bekken. Niet zozeer de bewegingsrange verschilde bij verschillende scoliosetypes, maar meer de manier waarop bewogen werd. Er is wel twijfel of de gebruikte methode geschikt is voor het doel van het onderzoek [28]. Boulay et al. 2006 toonden in een goed artikel de relatie tussen hellingshoek van het sacrum en de mate van bekken kanteling op de lordose van de lumbale wervelkolom, de thoracale kyfose en kanteling van Th9. Bij een kleine hellingshoek, werden een geringe lordose, kyfose en kanteling van Th9 gevonden, bij een grote hoek sterkere kromming en kanteling [29].
Asseman & Gahéry 2005 beschreven de invloed van verschillende posities van het hoofd op de balans bij handstand. Positie van het hoofd en de visus bleken grote invloed op de stabiliteit van de handstand te hebben [30]. Krishnamoorthy et.al 2002 vonden ook dat houdingsstabiliteit werd beïnvloed door visuele controle. Opvallend is hun vaststelling dat, staan op twee benen, zonder houdingsaanpassing, een verplaatsing van het lichaamszwaartepunt van 0,2 cm een verplaatsing van de schouder oplevert van 25cm. Hoewel enige beweging bij het handhaven van het evenwicht normaal is ziet men zelden zulke grote bewegingsuitslagen van het lichaam bij de rechtopstaande mens. Ondersteuning van hoofd of nek in stand bleek een groter effect te hebben op de stabiliteit dan ondersteuning met een vinger. Werd de vinger gefixeerd in een klip dan bleek de stabiliteit groter dan zonder fixatie. Ondersteuning aan de voorzijde van het lichaam bleek effectiever dan aan de zijkant [31]. Beide artikelen scoorden goed.
Bruijn et al. 2008 onderzochten de bijdrage van bekken en thorax aan de coördinatie bij verschillende gangsnelheden en de invloed van bewegingen van de armen en benen bij het beperken van de beweging van de romp om de verticale as. Hoewel het hoekmoment per segment ongeveer verdubbelde bij toenemende snelheid, veranderde het totale hoekmoment van het lichaam slechts gering bij toenemende snelheid, wat verklaard wordt uit het onderlinge faseverschil van de verschillende segmenten bij diverse loopsnelheden. Het onderzoek scoorde goed [32].
Cote et al. 2005 beschreven in een goed artikel de invloed van de voetstand op statische en dynamische houdingsstabiliteit. Zowel statische als dynamische stabiliteit werd beïnvloed door pronatie, neutraal of supinatie voet type [33]. Een meer geproneerde voetstand gaf een groter dynamisch bereik naar voren en mediaal. Bij een supinatiestand van de voet was het bereik groter in achterwaartse en laterale richting. Lecours et al. 2008 onderzochten, in een goed beoordeeld onderzoek, de relatie tussen romppositie bij opstaan met verschillende voetposities en asymmetrisch belasting van de benen en de knie hoekverandering. De plaatsing van de voet bij bewegen van zit naar stand, bleek van invloed op de zijwaarts verplaatsing en buiging van de romp en de mate van gewicht dragen op het standbeen en de kniehoek van het afzetbeen [34]. De invloed van kunstmatig opgewekte eversie van de calcaneus op de stand van heup, bekken en thorax bij staan op een been werd in een goed onderzoek door Tateuchi et al. 2011 bestudeerd. Heupflexie en endorotatie, voorover kanteling van het bekken en lateroflexie van de thorax naar de kant van het standbeen namen significant toe bij 5° en 10° eversie van de calcaneus. Bekkenkanteling naar de standbeenzijde was verminderd bij 5° eversie, maar toegenomen bij 10° in vergelijking met de positie bij 5°. De hoogte van de voetboog correleerde negatief met rotatieverandering van de thorax naar de standbeen zijde [35].
Kantor et al. 2001 onderzochten of houdingsstabiliteit bij verstoring van de lichaamsbalans af hangt van de omtrek van het steunvlak. Daartoe werd aan 7 proefpersonen gevraag om rustig adem te halen, zo diep mogelijk te ademen en om hun adem in te houden. Door te meten in 3 verschillende posities, staand, zittend met 100% ischiofemoraal contact en met 30% ischiofemoraal contact (op het puntje van de stoel) werd de mobiliteit van het bekken en lumbale gebied in het onderzoek betrokken. De slingerbeweging van de romp bleek in zittende positie groter dan in stand en bij 100% contact groter dan bij 30%. Drukpuntverplaatsing en slingerbeweging bleken tegengesteld aan elkaar. De beweging van thorax en crista iliaca waren in fase bij zitten en vertoonden geen duidelijk patroon bij staan. Hieruit werd de conclusie getrokken dat de mobiliteit van de gewrichten in de bestudeerde houdingsketen van aanvullende betekenis was bij de handhaving van de houding, waarbij de loodlijn vanuit het lichaamszwaartepunt binnen het steunvlak valt [36]. Ook Hodges et al 2002 onderzochten de houdingscompensatie bij ademhaling en vonden een verband tussen ademhaling en beweging van bekken en benen, die toenam bij grotere ademdiepte [8]. Waar bij Kantor nog enige twijfel is over theoretisch kader en selectie van proefpersonen scoort het artikel van Hodges 100 procent op alle onderdelen.
Behalve Kantor et al. 2001 en Hodges et al. 2002 geven alle artikelen de onderlinge verbondenheid van delen van het totale bewegingsapparaat weer. Kantor en Hodges beschrijven de invloed van de grootte van het steunvlak en mobiliteit op de lichaamsbalans. Omdat het lichaamszwaartepunt in een evenwichtssituatie moet vallen binnen het steunvlak geven deze artikelen informatie over de manier waarop dit door het bewegingsapparaat gecoördineerd wordt. (Tabel 2) De verbondenheid van onderdelen van het bewegingsapparaat bij de verstoring van de evenwichtssituatie, die al optreedt bij zeer geringe verandering van dit evenwicht, lijkt te wijzen in de richting van totaal beweging. Cote et al maakt onderscheidt in statische en dynamische houdingsstabiliteit, zonder het onderscheidt duidelijk te definiëren. Het is de vraag of er in enige situatie sprake kan zijn van een totale statische houding, omdat uit de onderzoeken van Kantor en Hodges blijkt dat zelfs ademhalen al een verstoring van de stabiliteit veroorzaakt. Het is voorstelbaar dat de veranderingen die optreden bij staan op een been met de calcaneus in eversie, zoals door Tateuchi onderzocht, ook zullen optreden bij lopen op een niet vlakke ondergrond. Wanneer alle onderzocht deelgebieden samen worden gevoegd bestaat de indruk dat verstoring van het stabiele evenwicht leidt tot aanpassingen in het gehele bewegingsapparaat, en dus tot totaal beweging.
- Beschrijving in artikelen van houdingsaanpassingen bij uitvoering van doelgerichte bewegingen (houdingsevenwicht).
Het begrip totaal beweging wordt het meest benaderd in onderzoeken naar de zogenaamde houdingsaanpassingen [7] [4] [9] [13] [36] [37].
Bouisset 2008 beschrijft in een goed onderzoek het principe van de houdingsaanpassing (HA) binnen het theoretisch kader, zoals de wetten van Newton, statisch en dynamisch evenwicht, zwaartekrachtcentrum en drukcentrum, steunvlak, externe en interne krachten, verstoring van evenwicht, dynamisch en statisch evenwicht, houdingshandhaving en houdingsondersteuning (stabiliteit). Elk lichaamsdeel moet gestabiliseerd worden ten opzichte van aanliggende delen. Elke mechanische activiteit die uitgeoefend wordt op enig deel van het lichaam wordt zonder vertraging voort geleid naar alle andere lichaamsdelen. Bouisset onderscheidt aanpassing die voorafgaat aan de willekeurige beweging, anticipatoire houdingsaanpassing (AHA), aanpassing van de houding tijdens deze beweging, synchrone houdingsaanpassing (SHA) en aanpassing van de houding na afloop van de willekeurige beweging, opvolgende houdingsaanpassing (OHA). Het vermogen van het lichaam om zich aan te passen aan balansverstoringen wordt kinetische capaciteit genoemd en onderscheiden in focaal en posturale kinetische capaciteit [9]. Aan de basis van het werk van Bouisset ligt een matig scorend onderzoek uit 1981 van Bouisset en Zatarra, wat aantoont dat, voorafgaand aan een willekeurige beweging van de bovenste extremiteit er altijd activiteit plaatsvindt in de onderste extremiteiten [13]. In 2002 beschreven Bouisset, Bozec en Ribreau in een goed onderzoek de houdingsaanpassingen bij isometrische uitgevoerde beweging. Bij maximale horizontale tweehandige isometrische duwbewegingen bleken de horizontale reactiekracht en de horizontale verplaatsing van het drukcentrum (CoP) vrijwel evenredig toe te nemen met de toenemende kracht. Bovendien bleek de verticale reactiekracht op zitniveau toe te nemen, terwijl die op voetniveau af nam, wat een verticale versnelling en verplaatsing van het zwaartepunt betekent. Daarentegen namen de horizontale reactiekrachten zowel op zitvlak-, als voetniveau, toe in voor-achterwaartse richting [37]. Een grotere beweeglijkheid van het bewegingsapparaat maakt een meer dynamische reactie op de verstoring van het evenwicht mogelijk, waardoor ook meer kracht geleverd kan worden volgens Le Bozec 2004 in een goed onderzoek [4]. Ook mobiliteit en omvang van het steunvlak zijn van invloed op de potentie om de balans te kunnen handhaven bij verstoring van evenwicht (Kantor 2001, score voldoende) [36]. Houdingsaanpassingen treden volgens Caronni 2009 (voldoende), niet alleen op bij grote bewegingen, maar ook bij minimale bewegingen van bijvoorbeeld een vinger. AHA’s zorgen niet alleen voor een vast punt voor het te bewegen lichaamsdeel en handhaving van het evenwicht, maar spelen ook een rol bij het controleren van het traject en de eindpositie van een bewegend deel [7].
De literatuur over evenwichtshandhaving onderscheidt een enkel en heup strategie bij verstoring van het evenwicht. De enkel strategie wordt door Madigan 2006 in een goed scorend onderzoek beschreven als een omgekeerde slinger waarbij het been als één segment beschouwd wordt. De heupstrategie is te zien als omgekeerde slinger, bestaande uit twee segmenten. Aan de hand van gewrichtskoppelingen bij actieve contracties van bepaalde spieren werd bestudeerd of er sprake is van verschillende strategieën. Proefpersonen werden, staand op een platform, met verschillende snelheden achterwaarts getrokken, waarbij EMG metingen aan de spieren werden gedaan en gewrichtshoekmetingen aan heup, knie en enkel [38]. De beschrijving van de evenwichtshandhaving door Runge 1999 is interessant. Door het gebruik van heup flexoren wordt het lichaam als het ware “verdeeld” in 2 segmenten. Doordat de flexoren de romp voorwaarts bewegen, roteert het bovenlichaam naar voren. De m. sternocleidomastoideus voorkomt het passief achterover klappen van het hoofd, waardoor hoofd en romp als een geheel bewegen. Quadriceps activiteit helpt bij de heupflexie en strekt tegelijk de knie, waardoor het been ook als één segment beweegt. De zwaartekracht levert daarop de neerwaartse kracht door het vooroverbuigen van de romp. Deze natuurlijke valbeweging van het bovenlichaam helpt de achterwaartse rotatie van het gestrekte been, waardoor het massa middelpunt van het gehele lichaam naar achter en daardoor weer in evenwicht wordt gebracht. Het artikel scoort maximaal bij beoordeling [39]. Door Mok 2010 werden stabiliteit en mobiliteit bij houdingshandhaving aan elkaar gekoppeld. Bij een kleine verstoring of een groot steunvlak vindt compensatie van de verstoring plaats vanuit de enkel. Bij grote verstoringen of een klein steunvlak worden ook bekken en wervelkolom ingeschakeld bij evenwichtshandhaving. Zijn onderzoek laat twijfel over de selectie van proefpersonen en referentiekader [40].
Hwang 2006 vond, in een goed onderzoek, bij het uitvoeren van een aanwijstaak een onevenredige toename van de houdingstremor van de onderste extremiteit bij staan op een been in verhouding tot staan op twee benen en grotere fluctuaties van bewegingen in de vooruit wijzende arm. Er leken twee naast elkaar bestaande strategieën voor stabiliteitshandhaving te worden gebruikt. Het verminderen van het aantal vrijheidsgraden van de bovenste extremiteit (grotere stijfheid) en gecoördineerde beweging in meerdere gewrichten om de zwaartepunt verplaatsing te verminderen [41]. Door Edwards 2007 werd aan de hand van een vierdelig model met drie gewrichten de minimale stijfheid berekend die nodig is in de gewrichten van enkel, knie en heup om het evenwicht te kunnen handhaven bij verschillende combinaties van gewrichtsbeweging [42]. Het onderzoek scoorde goed.
Alle hierboven beschreven principes worden teruggevonden in de artikelen van Naito et al. 2010 en Shan en Westerhof 2005. Naito et al. deden onderzoek naar de ketenbeweging bij de voetbal wreeftrap. Zowel de invloed van het schoppende been, als het aandeel van romp en standbeen op de effectiviteit van de trap werd bestudeerd. Hoewel dit onderzoek zich vooral richtte op het ontrafelen van de dynamica van de effectieve wreeftrap, geeft het een fraai inzicht in de complexiteit van deze beweging. Positie en rotatie van de romp, plaatsing en stijfheid van het standbeen, het startmoment van de schopbeweging, de maximale knieflexie aan het begin van de schopbeweging, maximale hoeksnelheid van de heupflexie en van de knie extensie van het schoppende been werden beschreven [25]. Shan en Westerhof bestudeerden dezelfde voetbal trap, maar beschreven nadrukkelijk de invloed van de romp op de effectiviteit van de schopbeweging. Een effectieve voetbaltrap maakt gebruikt van het totale lichaam en multi-gewrichtscoördinatie [24]. Beide artikelen scoorden maximaal.
Het artikel van Berret et al. 2009 begint met de zin:” de meeste van onze dagelijkse activiteiten hebben betrekking op het gehele lichaam”. Aan de hand van verschillende bewegingscondities en houdingsrestricties beschrijft het artikel hoe ons centraal zenuwstelsel de coördinatie van bewegingen aanpast aan de gevraagde condities. Het beschrijft, hoewel moeilijk leesbaar, de bewegingskarakteristieken van de verschillende delen van het lichaam onder de verschillende omstandigheden. De uitkomsten van de aansturing door het centraal zenuwstelsel geeft een beeld waaruit blijkt dat vrijwel alle delen van het lichaam betrokken zijn bij de uitgevoerde bewegingen [43].
Uit verschillende onderzoeken blijkt het bestaan van houdingsaanpassingen, voorafgaand aan, tijdens en na de uitgevoerde actie. Aanpassingen blijken zowel in open als bij gesloten bewegingsketens op te treden. Daarbij speelt het handhaven van evenwicht, zowel binnen het bewegingssysteem als ten opzichte van de ondergrond een belangrijke rol. Mobiliteit en steunvlak zijn van invloed op de houdingsstabiliteit, maar bij verstoring van het evenwicht kan vermindering van het aantal vrijheidsgraden van de bewegingsketen ook bijdragen aan de stabiliteitshandhaving. Aansturing vanuit het centraal zenuwstelsel zorgt voor aanpassing aan de gevraagde condities. In de onderzoeken die de voetbaltrap beschrijven lijken al deze elementen samen te vallen met de biomechanische ontleding van deze beweging, die beschouwd kan worden als een totaal beweging.
Discussie
In de discussie zal getracht worden aan de hand van de drie deelvragen uit de inleiding een antwoord te geven op de vraag of totaal bewegen, feit of fictie is.
Welke biomechanische verklaring is er voor aanname dat beweging van een botstuk in één gewricht altijd zal leiden tot beweging in alle gewrichten van de bewegingsketen?
De onderzoeken die zijn gevonden op basis van de zoektermen beschrijven delen van het totale biomechanische proces. Het ene onderzoek beschrijft de beweging van heup, lumbale en thoracale wervelkolom bij opstaan [17]. Andere onderzoekers kijken naar de beweging van de thoracale wervelkolom bij beweging van de arm [16] of naar de bijdrage van de heup bij de extensie van de wervelkolom in stand [20]. Gekozen begrenzingen van de ketens zijn discutabel. Waarom koppelen Theodoris & Ruston 2002 de armbeweging aan de thoracale wervels, terwijl Takasaki et al. 2009 de cervicale wervelkolom bij dezelfde beweging bestuderen [16] [14]. De vaststelling dat bewegen van een deel van het bewegingsapparaat beweging in andere delen tot gevolg heeft kan gezien worden als een aanwijzing voor het bestaan van totaalbeweging (tabel 1 en 2). Berthonnaud et al. 2005, Labelle et al. 2005, Pasha et al. 2010 en Boulay et al. 2006 constateerden allen een relatie tussen verschillende bewegingssegmenten, waarbij Pasha de invloed in drie bewegingsvlakken beschreef, waar de anderen slechts het sagittale vlak beschouwden [26] [27] [28] [29].
De invloed van stand en plaatsing van de voeten op stabiliteit en dynamisch bereik (Cote et al. 2005), opstaan (Lecours et al. 2008) en positionering van andere delen van het bewegingsapparaat (Tateuchi et al. 2011) wijst ook op totaalbeweging. Het laatste artikel laat zien hoe door slechts enkele graden verandering van de voetstand de stand van heupen, bekken en thorax wordt beïnvloed (Cote, Brunet, Gansneder, & Shult, 2005) (Tateuchi, Wada, & Ichihashi, 2011).
Onderzoek naar de wreeftrap bij voetballers geeft een goed inzicht in de complexiteit van een relatief simpele beweging als het trappen tegen een bal [25] [24]. Het schoppende been, onderverdeeld in knie-, enkel- en heupgewricht kan beschouwd worden als de bewegende keten. Het door Naito beschreven standbeen en de door Shan bestudeerde schouder en arm, zowel aan de kant van het schoppende been als aan de standbeen zijde, vormen, samen met de romp, de houdingsketen. Hoewel beide onderzoekers de schopbeweging verschillend verklaren leveren zij samen een overtuigende bijdrage aan de aanname dat beweging van een botstuk in een gewricht leidt tot beweging in aangrenzende botstukken en gewrichten. Omdat naast het schoppende been ook de rompbeweging, de armbeweging en het standbeen beschreven worden, kan gesteld worden dat het gehele bewegingsapparaat bij de beweging is betrokken.
Vaststellen van deze relaties betekent niet dat er ook een sluitende verklaring voor wordt gegeven. Is de reactieve beweging in andere delen het gevolg van krachten die werken via kapsels, ligamenten, spieren en pezen of veroorzaakt de positieverandering van het botstuk in de ruimte aan de uiteinden van het botstuk een andere positie in de gewrichten (tandraderen) of is sprake van een combinatie van beiden. Hoe worden deze positieveranderingen dan over gedragen aan de aangrenzende botstukken? Is dit het gevolg van de vorm van de gewrichtsprofielen of spelen nog andere factoren een rol? Uit het onderzoek van Takasaki et al.2009 blijkt verschil tussen passief en actief bewegen, wat duidt op invloed van spierkracht op de reactieve bewegingen in andere gewrichten [14]. Er werden geen artikelen gevonden die het bestaan van bewegingsketens ontkenden. Mogelijk is dit het gevolg van de gekozen zoektermen.
Om een doelgerichte beweging mogelijk te maken moet de rest van het lichaam zodanig worden gepositioneerd dat de loodlijn uit het lichaamszwaartepunt valt binnen het steunvlak. Is in de literatuur het bestaan van houdingsketens terug te vinden?
Een duidelijke aanwijzing voor het bestaan van houdingsketens wordt gevonden in de onderzoeken naar houdingsaanpassingen [7] [36] [8] [31] [9] [13] [37] [4]. Alles draait om het handhaven van het evenwicht voorafgaand aan de beweging, gedurende het bewegingsverloop, maar ook na de uitvoering van de beweging. Het handhaven van evenwicht is daarmee een actief, dynamisch proces. Daarbij spelen interne en externe mechanische factoren als zwaartekracht, actie – en reactiekracht, steunvlak, statisch en dynamische evenwicht, stabiliteit etc. een rol. Beschreven wordt hoe verschillende spieren bij een doelgerichte beweging op verschillende momenten actief zijn. Daaruit wordt duidelijk dat al voorafgaand aan de beweging, er activiteit plaats vindt in het bewegingsapparaat. Deze anticipatoire houdingsaanpassingen (AHA) zorgen voor een goede uitgangspositie voor de geplande beweging. Ook tijdens de uitvoering van de beweging vindt voortdurend bijsturing plaats door het aan- en ontspannen van spieren of spiergroepen, de synchrone houdingsaanpassing (SHA). Uiteindelijk wordt de beweging afgerond tot een stabiele eindsituatie door opvolgende houdingsaanpassing (OHA). Caronni beschrijft dit voor een simpele beweging met de wijsvinger [7], Hodges et al. 2002 en Kantor et al. 2001voor de ademhaling [8] [36]. Bozec et al 2004 en Bouisset et al. 2002 bij uitvoeren van isometrische duwbewegingen, Berret et al. 2009 bij aanwijstaken [43] [37] [4].
Het artikel van Shan en Westerhof 2005, beschrijft het belang van een goede uitgangspositie van romp en standbeen op de effectiviteit van de schopbeweging, maar laat ook duidelijk zien dat het een dynamisch proces betreft. [24]. Door Naito et al. 2010 wordt de relatie beschreven tussen spiermomenten en krachten werkend op de bewegingselementen in het systeem. Vervolgens wordt de relatie gelegd tussen spiermoment en gewrichtsbeweging om de coördinatie tussen verschillende gewrichten te analyseren en wordt het verband geanalyseerd tussen gewrichtshoekversnelling en de veroorzakende dynamische factoren [25]. Of de projectie van het lichaamszwaartepunt steeds binnen het steunvlak valt wordt in beide artikelen niet vermeld.
Bij een grotere mobiliteit blijkt het gemakkelijker om de projectie van de loodlijn uit het lichaamszwaartepunt binnen het steunvlak te laten vallen [36]. Zonder interne vervormingen binnen het bewegingssysteem zou een verplaatsing van het massamiddelpunt van 0.2 cm leiden tot een verplaatsing van de schoudergordel van 25 cm [31]. Het aanbrengen van een extern steunpunt, vermindert de slingerbeweging van het lichaam bij staan door vergroting van het steunvlak [31]. Vervorming binnen het bewegingssysteem door het inschakelen van houdingsketens en vergroting van het steunvlak zijn er verantwoordelijk voor dat de loodlijn uit het zwaartepunt binnen het steunvlak valt.
Deze onderzoeken beschrijven het belang van evenwicht en stabiliteit binnen het bewegingssysteem. Of beweging ook mogelijk is zonder krachtenevenwicht binnen het systeem is niet duidelijk. Mobiliteit lijkt van invloed op de evenwichtshandhaving. Een grotere mobiliteit betekent echter ook dat een groter beroep wordt gedaan op de evenwichtshandhaving (postural kinetic capacity) en coördinatie. Zou het kunnen dat binnen het totale bewegingssysteem delen daarvan onbeweeglijk blijven ten opzichte van elkaar om een meer stabiele situatie te creëren (Edwards, 2007) (Runge, Shupert, Horak, & Zajac, 1999).
Door het bewegen van een botstuk of gewricht in het menselijk lichaam zal verstoring van de balans binnen het bewegingsapparaat optreden. Hoe wordt deze balansverstoring gecompenseerd bij gezonde personen?
Bouisset maakt een belangrijke opmerking als hij stelt dat niet alleen de balans van het totale lichaam ten opzichte van het steunvlak in beschouwing moet worden genomen, maar dat ook gekeken moet worden naar de balans van elk afzonderlijk botstuk tegenover aanliggende botstukken in het articulerende geheel van het lichaam [9]. Er dient voldoende stijfheid in het systeem te worden opgebouwd om een stabiele situatie voor de beweging te creëren [42] [39]. Omdat het creëren van stijfheid door co-contractie van spieren veel energie kost, wordt gebruik gemaakt van de gewrichtsgeometrie [41].
Het onderzoek van Bouisset et al. 2002 beschrijft een beweging in een gesloten keten. Dit betekent dat er geen verplaatsing optreedt van delen van het lichaam, maar dat er uitsluitend een isometrische kracht wordt uitgeoefend. Deze verandering van kracht levert aanpassingen op in de gehele keten, zonder zichtbare verplaatsing van deelmassa’s. Blijkbaar geeft de verandering van de uitgeoefende kracht een dusdanige verstoring in het krachtenevenwicht in de uitgangssituatie, dat daarop een reactie volgt in de gehele bewegingsketen. Immers, er treden veranderingen op in de gemeten reactiekrachten onder zitvlak en voeten. De positie van het zwaartepunt, de horizontale reactiekracht en het drukmiddelpunt verplaatsen zich met het toe- of afnemen van de uitgeoefende kracht en in verschillende spieren treden contracties op [37].
Het onderzoek van Bruijn et al. 2008 beschrijft verschillen in beweging van lichaamsdelen bij verschillende loopsnelheden. Dit betekent dat lichaamsdelen bij het lopen onderling beweging vertonen. Het lichaam als geheel beweegt ten opzichte van de ondergrond en de omgeving. Het is aannemelijk dat de interne beweging dient om het lichaam in balans te houden tijdens het lopen [32].
In de artikelen van Berthonnaud et al. 2005 en Labelle et al. 2005, die de relatie beschouwen tussen bekken, wervelkolom en hoofd, komt een aantal principes van de Manuele Therapie E.S.® aan de orde. Verandering in vorm of oriëntatie van een segment in de keten van heup tot hoofd veroorzaakt een reactieve verandering in andere delen van de keten teneinde een stabiele situatie te handhaven met een minimum aan energieverbruik. Labelle onderscheidt drie belangrijke segmenten te weten 1) het hoofd, dat via de nek verbonden is met 2) de romp die via het bekken verbonden is met 3) de onderste extremiteiten. Deze indeling doet denken aan de door van der Bijl beschreven deelmassa’s kop, thorax en buik [26] [27].
Pasha et al. 2010 laten zien dat stand van het bekken gekoppeld is aan de bewegingen van de wervelkolom [28]. Deze koppeling van stand en beweging wordt ondersteund door Lecours et al. 2008 die soortgelijk onderzoek deed naar voetplaatsing en beweging bij opstaan vanuit zit, Tateuchi et al. 2011 die de invloed van eversie van de calcaneus op heup, bekken en thorax beschreef en Cote et al. 2005, die invloed van verschillende voettypes beschreef op de houdingsstabiliteit en de reikwijdte van proefpersonen [34] [35] [33]. Dat zelfs ademhaling van invloed is op de houdingsstabiliteit en de lichaamsbalans werd door Kantor et al. 2001 en Hodges et al. 2002 onderzocht. Er bleek bovendien een relatie tussen mobiliteit en de potentie om de balans te handhaven. Bij grotere mobiliteit nam het slingermoment af [36], [8].
Tot slot moet nog genoemd worden het onderzoek van Asseman & Gahéry 2005 naar de invloed van verschillende hoofdposities op het evenwicht bij het maken van een handstand. De duidelijke relatie die er is bij het maken van een handstand kan natuurlijk niet automatisch gekopieerd worden naar de rechtopstaande positie. Door de positie van het hoofd, hangend onderaan de wervelkolom bij handstand, is de verstorende invloed bij positieverandering van het hoofd veel minder groot, dan bij rechtop staan. Toch is er een duidelijke invloed van de positie van het hoofd op de totale bewegingsketen wanneer een persoon zich in deze houding bevindt [30].
Zoals ook al bij de houdingsketen werd beschreven spelen evenwicht en stabiliteit een belangrijke rol binnen het bewegingssysteem. Of ook werkelijk alle componenten meedoen is niet duidelijk. De mogelijkheid om door middel van stijfheid de balansverstoring te verminderen wordt namelijk ook beschreven. De grote verschillen in onderzoeksopzet, methode en de arbitraire begrenzingen van het ketenonderzoek maken het trekken van eenduidige conclusies moeilijk. Door de beperking die de gebruikte zoektermen opleveren wordt niet duidelijk of er bewijs bestaat voor het tegendeel van totaal bewegen.
Het is praktisch niet uitvoerbaar om tegelijkertijd alle gewrichtsbewegingen in het lichaam te registreren bij het uitvoeren van een bepaalde beweging. Door bijvoorbeeld te onderzoeken of er hoekstandsverandering optreedt in de kniegewrichten van een op de rug liggende persoon bij het optillen van een arm en of er verandering van druk op de, op de grond rustende, hakken optreedt, zou indicatief kunnen zijn voor totaalbeweging. Immers in ruglig speelt evenwichtshandhaving een minimale rol. Deel onderzoek, zoals hiervoor beschreven, verschaft wel meer inzicht in de fundamentele mechanica van het bewegingsapparaat.
Conclusie
Geen van deze onderzoeken afzonderlijk levert het bewijs voor totaal bewegen, maar alle onderzoeken tonen een interactie tussen de verschillende bewegingscomponenten in de onderzochte gebieden. De begrenzing van de gebieden verschilt per onderzoeker en de gehanteerde methodes zijn niet uniform. Er zijn geen onderzoeken gevonden die het bestaan van bewegingsketens ontkennen, mogelijk door de beperking van de gebruikte zoektermen. Geen enkel onderzoek beschrijft interactie tussen alle componenten.
Bij onderzoeken naar gekoppelde bewegingen in verschillende delen van het lichaam wordt aangetoond dat verschillende bewegingssegmenten elkaar beïnvloeden. Een verplaatsing van het massa middelpunt van het lichaam van 0.2 mm zou een verplaatsing van ongeveer 25cm van de schoudergordel tot gevolg hebben, wanneer het lichaam zou functioneren als twee delen verbonden door één scharnier [31]. Dat dit niet gebeurt, moet te maken hebben met intrinsieke beweging van tussenliggende bewegingselementen. De aanpassing van stand en oriëntatie van de houdingsketen als gevolg van standsverandering van een botstuk toont dat geïsoleerd bewegen van één botstuk niet mogelijk is. Er moet sprake zijn van zowel intern evenwicht, dus binnen gewrichtssystemen en bewegingsketens, als evenwicht ten opzichte van de omgeving. Handhaving van dit evenwicht vraagt actieve en passieve aanpassingen van het totale bewegingsapparaat.
In het bijzonder de artikelen die handelen over houdingsevenwicht geven richting aan de onderbouwing van het paradigma totaal beweging. Als we het lichaam beschouwen als opgebouwd uit botstukken, die onderling ten opzichte van elkaar kunnen bewegen, dan moet het zo zijn, dat bij een evenwichtssituatie de loodlijn uit het lichaamszwaartepunt valt binnen het steunvlak. Het uitstrekken van een arm kan slechts plaatsvinden als de verstoring van het evenwicht door de verplaatsing van het gewicht van die arm gecompenseerd wordt door het verplaatsen van evenveel gewicht in tegengestelde richting. Echter ook binnen bijvoorbeeld het schoudergewricht zal een evenwichtssituatie moeten bestaan om de arm te kunnen optillen en uitstrekken. De uitwendige op het gewricht werkende krachten, zoals spierkracht, zwaartekracht en de krachten die door kapsel en ligamenten wordt uitgeoefend op het gewricht dienen in evenwicht te zijn met de inwendige krachten in het gewricht. Reactiekracht, wrijvingskrachten, druk- en trekkrachten moeten vallen binnen het steunvlak van de gewrichtscomponenten. Anders zal het gewricht luxeren of blokkeren. Tijdens een beweging veranderen deze krachten, waarbij steeds reactieve interactie wordt gevraagd van de verschillende elementen van het bewegende lidmaat. Dit is wat in de artikelen die handelen over de onderzoeken naar houdingsaanpassingen wordt beschreven als anticipatoire, synchrone en opvolgende houdingsaanpassingen. Omdat tijdens actief bewegen ook het evenwicht ten opzichte van de ondergrond gehandhaafd dient te worden kan gesproken worden van totaalbeweging. De artikelen over houdings- en bewegingsketens zijn niet eenduidig van opzet en begrenzing, maar maken wel duidelijk dat beweging altijd in ketens plaats vindt. Er werden geen onderzoeken gevonden die geïsoleerde beweging in één gewricht beschreven. Waar de bewegingsketen ophoudt en de houdingsketen begint is arbitrair.
De verbondenheid van onderdelen van het bewegingsapparaat bij de verstoring van de evenwichtssituatie, die al optreedt bij zeer geringe verandering van dit evenwicht, lijkt te wijzen in de richting van totaal beweging. Cote et al. maakt onderscheidt in statische en dynamische houdingsstabiliteit, zonder het onderscheid duidelijk te definiëren. Het is de vraag of er in enige situatie sprake kan zijn van een totale statische houding.
Geen van de gevonden studies leveren afzonderlijk een bewijs voor het totaal bewegen, zoals door Van der Bijl werd gedoceerd, maar uit de beschreven literatuur kan het paradigma van de totaalbeweging zoals die gehanteerd wordt in de Manuele Therapie E.S.® in elk geval als voorstelbaar beschouwd worden. Berthonnaud et al. 2005 en Labelle et al. 2005 maken daarbij een indeling van het lichaam, die globaal overeen komt met de indeling in kop, romp en buik zoals die door Van der Bijl sr. wordt gehanteerd. Bij de biomechanische verklaring lijkt het handhaven van een dynamisch evenwicht van alle binnen het bewegingssysteem werkzame krachten van belang. Contractie van een spier leidt tot verstoring van het krachtenevenwicht in het gewricht waarop deze spier actief is. Als gevolg daarvan zal het gewricht een beweging uitvoeren. Deze beweging veroorzaakt een balansverstoring in het lichaam, die opgevangen wordt door het aanspannen van andere spieren en het herpositioneren van alle (?) botten en gewrichten. Factoren als steunvlak, lichaamszwaartepunt, massamiddelpunt, wrijvingskrachten, externe steunpunten of –vlakken zijn van invloed op het uiteindelijke resultaat van het aanspannen van een spier om een bepaalde actie uit te voeren. Zowel mobiliteit als stijfheid spelen een rol bij evenwichtshandhaving. De mobilisering van alle gewrichten zoals door de Manueel therapeut E.S.® wordt uitgevoerd zou dus zowel een positief als negatief effect kunnen hebben op de evenwichtshandhaving. In het kader van deze review is niet gezocht naar de effectiviteit van interventies.
De onderzoeken naar houdingsevenwicht benaderen nog het meest het begrip totaal beweging. Het onderscheid in houdings- en bewegingsketens is arbitrair. Waar houdt de bewegingsketen op en begint de houdingsketen. In de beschrijving van de houdingsaanpassingen wordt dit onderscheid dan ook terecht niet gemaakt. Wel is duidelijk dat stabiliteit een belangrijke voorwaarde is voor effectief bewegen, wat niet wil zeggen dat beweging zonder evenwicht en stabiliteit onmogelijk is.
Met dit onderzoek is geprobeerd een fundamentele bijdrage te leveren aan de onderbouwing van het vak van Manueel therapeut E.S.®
Literatuurlijst
| [1] | S. Holzner, Natuurkunde voor dummies, Amsterdam: Pearson Education Benelux, 2010. |
| [2] | G. v. d. Bijl, Het individuele functiemodel in de Manuele Therapie., Lochum-Gent: De Tijdstroom, 1986. |
| [3] | J. J. De Cock, Begrippen van Manuele Therapie Systeem van der Bijl., Utrecht: De Tijdstroom, 1996. |
| [4] | S. L. Bozec en S. Bouisset, „Does postural chain mobility influence muscular control in sitting ramp pushes?,” Exp. Brain Res., pp. 427-437, 2004. |
| [5] | S. Bouisset, J. Richardson and M. Zattara, “Do anticipatory postural adjustments occurring in different segments of the postural chain follow the dame organisational rule for different task movement velocities, independnetly of the inertial load value?,” Exp. Brain Res, pp. 132:79-86, 2000. |
| [6] | M. Bussey, M. Bell and S. Milosavvljevic, “The influence of hip abduction and external rotation on sacroiliac motion.,” Manual Therapy, pp. 14: 520-525, 2009. |
| [7] | A. Caronni and P. Cavalleri, “Anticipatory postural adjustments stabilise the whole upper-limb prior to a gentle index finger tap.,” Exp. Brain Res, pp. 194: 59-66, 2009. |
| [8] | P. Hodges, V. Gurfinkel, S. Brumagne, T. Smith and P. Cordo, “Coëxistence of stability and mobility in postural control: evidence from postural compensation for respiration.,” Exp. Brain Res, pp. 144:293-302, 2002. |
| [9] | S. Bouisset, “Posture, Dynamic stability and voluntary movement.,” Clinical Neurophysiology, pp. 38: 345-362, 2008. |
| [10] | C. Riezebos, “Het richten van krachten.,” Versus, pp. 1:18-41, 2002. |
| [11] | S. Bok, Cybernetica, Utrecht/Antwerpen: Het Spectrum, 1972. |
| [12] | H. Oonk, Osteo- en arthrokinematica., Weert: Henric Graaff van IJssel, 1988. |
| [13] | S. Bouisset and M. Zatarra, “A sequence of postural movement precedes voluntary movement.,” Neuroscience Letters, pp. 22: 263-270, 1981. |
| [14] | H. Takasaki, S. Kaneko, T. Hall, T. Lizawa and Y. Ikemoto, “Cervical segmental motion induced by shoulder abduction assessed by magnetic resonance imaging.,” Spine, pp. 34, nr3: E122-E126, 2009. |
| [15] | F. Fayad, S. Hanneton, M. Lefevre-Coau, S. Poiraudeau, M. Revel and A. Roby-Brami, “The trunk as a part of the kinematic chain for arm elevation in healthy subjects and in patiënts with frozen shoulder.,” Brain Research, pp. 1191, 107-115, 2008. |
| [16] | D. Theodorides and S. Ruston, “The effect of shoulder movements on thoracic spine in 3D motion.,” Clinicla Biomechanics, pp. 17: 418-421, 2002. |
| [17] | E. Tully, M. Fotoohabadi and M. Galea, “Sagittal spine and lower limb movement during sit-to-stand in healthy young subjects.,” Gait & Posture, pp. 338-345, 2005. |
| [18] | Y. Kuo, E. Tully and M. Galea, “Lumbofemoral rhytm during active hip flexion in standing in healthy older adults.,” Manual Therapy, pp. 15, 88-92, 2010. |
| [19] | P. Pal, S. Milosavljevic, G. Sole and G. Johnson, “Hip and lumbar continouus motion characteristics during flexion and return in young healthy males.,” Eur Spine J, pp. 16: 741-747, 2007. |
| [20] | S. Milosavljevic, P. Pal, D. Bain and G. Johnson, “Kinematic and temporal interactions of the lumbar spine during trunk extension in healthy male subjects.,” Eur Spine, pp. 17: 122-128, 2008. |
| [21] | C. Nott, F. Zajac, R. Neptune and S. Kautz, “Alle joint moments significantly contribute to trunk angular acceleration.,” Journal of Biomechanics, pp. 29, 259-276, 2010. |
| [22] | S. Scholtes, S. Gombatto and L. v. Dillen , “Differences in lumbopelvic motion between people with and people without low back pain during two lower limb movements.,” Clin. Biomech (Bristol, Avon), pp. 24(1): 7-12, 2009. |
| [23] | G. Li, S. Wang, Q. Xia, G. Li and K. Wood, “Segmental in vivo vertebral motion during functional human spine activities.,” Eur. Spine, pp. 18, 1013-1021, 2009. |
| [24] | G. Shan and P. Westerhof, “Full-body kinematic characteristics of the maximal instep soccer kick by male soccer players and parameters related to kick quality.,” Sports biomechanics, pp. 4 (1): 59-72, 2005. |
| [25] | K. Naito, Y. Fukui and T. Maruyama, “Multijoint kinetic chain analysis of knee extension during soccer instep kick.,” Human Movement Science, pp. 29: 259-276, 2010. |
| [26] | E. Berthonnaud, J. Dimnet, P. Roussouly and H. Labelle, “Analysis of the sagittal balance of the spine and pelvis using shape and orientation parameters.,” J Spinal Disord Tech, pp. 18-1: 40-47, 2005. |
| [27] | H. Labelle, P. Roussouly, E. Berthonnaud, J. Dimnet and M. O’Brien, “The importance of spino-pelvicbalance in L5-S1 developmental spondylolisthesis.,” Spine, pp. 30-6S: S27-S34, 2005. |
| [28] | S. Pasha, A. Sangole, C. Aubin, S. Parent, J. Mac-Thiong and H. Labelle, “Characterizing pelvis dynamics in adolescent with idiopathic scoliosis.,” Spine, pp. 35-17: E820-E826, 2010. |
| [29] | C. Boulay, C. Tardieu, J. Hecquet, C. Benaim, B. Mouilleseaux, D. Prat-Padel, J. Legaye, G. Duval-Beaupère and J. Pélissier, “Sagittal alignment of spine and pelvis regulated by pelvic incidence: standard values and prediction of lordosis.,” Eur Spine J, pp. 15: 415-422, 2006. |
| [30] | F. Asseman and Y. Gahéry, “Effect of head and visual condition on balance control in inverted stance.,” Neuroscience Letters, pp. 375: 134-137, 2005. |
| [31] | V. Krishnamoorthy, H. Slijper and . M. Latash, “Effects of different types of light touch on postural sway.,” Exp Brain Res, pp. 147: 71-79, 2002. |
| [32] | S. Bruijn, O. Meijer, J. Dieeën, I. Kingma and C. Lamoth, “Coördination of leg swing, torax rotations and pelvis rotations during gate: The organisation of total body angular momentum.,” Gait & Posture, pp. 27: 455-462, 2008. |
| [33] | K. Cote, M. Brunet, B. Gansneder and S. Shult, “Effects of pronated and supinated foot postures on static and dynamic postural stability.,” Journal of Athletic Training, pp. 40(1): 41-46, 2005. |
| [34] | J. Lecours, S. Nadeau and L. Texeira-Salmela, “Interactions between footplacement, trunk frontal position, weight-bearing and knee moment asymmetry at seat-off during rising from a chair in healthy controls and persons with hemiparesis.,” J Rehabil Med, pp. 40:200-207, 2008. |
| [35] | H. Tateuchi, O. Wada and N. Ichihashi, “Effects of calcaneal eversion on three-dimensional kinematics of the hip, pelvis and thorax in unilateral weight bearing.,” Human Movement Science, pp. (30) 566-573, 2011. |
| [36] | E. Kantor, L. Poupard, S. L. Bozec and S. Bouisset, “Does body stability depend on postural chain mobility or stability area?,” Neuroscience Letters, pp. 308: 128-132, 2001. |
| [37] | S. Bouisset, S. L. Bozec and C. Ribreau, “Postrural dynamics in maximal isometric ramp efforts.,” Biol. Cybern., pp. 87: 211-219, 2002. |
| [38] | M. Madigan, B. Davidson and M. Nussbaum, “Postural sway and joint kinematics during quiet standing are affected by lumbar extensor fatigue.,” Human Movement Science, pp. 25: 788-799, 2006. |
| [39] | C. Runge, C. Shupert, F. Horak and F. Zajac, “Ankle and hip postural strategies defined by joint torques.,” Gait & Posture, pp. 10: 161-170, 1999. |
| [40] | N. Mok, S. Brauer and P. Hodges, “Changes in lumbar movement in people woth low back pain and related to compromised balance.,” Spine, pp. 36(1): E45-E52, 2010. |
| [41] | I.-S. Hwang, C.-T. Huang, R.-J. Cheng and C.-C. Huang, “Postural fluctuaitions during pointing from unilateral or bilateral stand.,” Human Movement Science, pp. 25: 275-291, 2006. |
| [42] | W. Edwards, “Effect of joint stiffness on standing stability.,” Gait & Posture, pp. 25: 432-439, 2007. |
| [43] | B. Berret, F. Bonnetblanc, C. Papaxanthis and T. Pozzo, “Modular control of pointing beyond arm’s lenght.,” The journal of neuroscience, pp. 29(1): 191-205, 2009. |
| [45] | E. Tully and B. Stillman, “Computer-aided vidoe analysis of vetrebrofemoral motion during toe touching in healthy subjects.,” Arch Phys Med Rehabil , pp. 78: 759-766, 1997. |
| [46] | i. t. Centraal BegeleidingsOrgaan, „Handleiding EBRO,” november 2007. [Online]. Available: http://www.cbo.nl/thema/Richtlijnen/EBRO-handleiding/5-Literatuuronderzoek/. [Geopend 30 oktober 2011]. |
| [47] | K. v. d. G. CBO, „Evidence based richtlijn ontwikkeling,” CBO, Utrecht, 2007. |
Bijlagen, figuren, tabellen
Figuur 1.: Illustration of Newton’s laws in shoulder abduction performed in two support base conditions. A. Top inset: Newton’s laws, (1): ‘‘dynamic resultant law’’, (2) ‘‘kinetic torque law’’. Eq. (1) relates the external forces resultant to the dynamic resultant, which is the center of gravity (CoG) linear acceleration times body mass (m). Eq. (2) relates the resultant moment of external forces to the kinetic moment, which is the angular acceleration times the body moment of inertia (JG) with respect to the CoG. A: lower inset: when the subject is at rest (ΣFe = 0 and ˙ΣMG(Fe) = 0), for instance during quiet standing, he is subjected to gravity (P) and ground reaction (R) forces. One is applied to the center of gravity (Go), and the other to the center of pressure (Io). The center of pressure (CoP) is the barycenter of the minute ground reaction forces applied to the subject’s contact areas, such as Ri. B (middle inset), upper part: the feet are in contact with the ground. During shoulder abduction, there is a displacement of the CoG, from Go to G1, and of the CoP, from Io to I1. B. Lower part: external forces balance sheet: during the movement (ΣFe ≠ 0 and ˙ΣMG(Fe)≠ 0), the subject is always subjected to gravity (P) and ground reaction (R) forces. However, the ground reaction forces display a vertical (RN) and a horizontal (RT) component, which vary at each instant. C. Right inset, upper part: the feet are no longer in contact with the ground and gravity force is nil (as in a space lab), the upper limb and the rest of the body move in opposite directions. The body’s center of gravity no longer moves (G1=Go) and there is no longer a center of pressure, as there is no contact between the subject and the ground. Right inset, lower part: external forces balance sheet: the subject is no longer subjected to any force.
Bijlagen:
Scoringslijst artikelen
| Resultaten beoordeling artikelen: | auteur | extern | gem. | Citaat nr. | ||
| 1 | Tully, E.A | Sagittal spine and lower limb movement during sit-to-stand in healthy young subjects |
14 * C** | 16 | 15,00 | 17 |
| 2 | Kuo, Y-L | Lumbofemoral rhythm during active hip flexion in standing in healthy older adults. |
12 C | 16 | 14,00 | 18 |
| 3 | Li, G | Segmental in vivo vertebral motion during functional human lumbar spine activities. | 14C | 14 | 14,00 | 23 |
| 4 | Fayad,F | The trunk as a part of the kinematic chain for arm elevation in healthy subjects and in patiëntes with frozen shoulder | 13 B | 16 | 15,50 | 15 |
| 5 | Nott, CR | All joint moments significantly contribute tot trunk angular acceleration. | 12 C | X | 12,00 | 21 |
| 6 | Pal, P | Hip and lumbar continuous motion characteristics during flexion and return in young healthy males. | 16 C | X | 16,00 | 19 |
| 7 | Takasaki, H | Cervical segmental motion induced by shoulder abduction assessed by Magnetic Resonance Imaging | 14 C | 14 | 14,00 | 14 |
| 8 | Theodoridis, D | The effect of shoulder movements on thoracic spine 3D motion. | 11 C | X | 11,00 | 16 |
| 9 | Bussey, MD | The influence of hip abduction and external rotation on sacroiliac motion | 14 C | X | 14,00 | 6 |
| 10 | Caronni, A | Anticipatory postural adjustments stabilise the whole upper-limb prior to a gentle index finger tap | 13 C | X | 13,00 | 7 |
| 11 | Berthonnaud, E | Analysis of teh sagittal balance of the spine and pelvis using shape and orientation parameters | 14 C | 13 | 13,50 | 26 |
| 12 | Bozec, S Le | Does postural chain mobility influence muscular control in sitting ramp pushes | 15 C | X | 15,00 | 4 |
| 13 | Bouisset, S | Posture,dynamic stability, and voluntary movement. | 16 C | X | 16,00 | 9 |
| 14 | Bruijn, SM | Coordination of leg swing, thorax rotations and pelvis rotations during gait: The organisation of total body angular momentum. | 15 C | X | 15,00 | 32 |
| 15 | Lecours, J | Interactions between foot placement, trunk frontal position, weight-bearing and knee moment asymmetry at seat-off, during rising from a chair in healthy controls ans persons with hemiparesis. | 15 B | X | 15,00 | 34 |
| 16 | Tully, EA | Computer-Aided Video Analysis of Vertebrofemoral motion during toe touching in healthy subjects | 13 C | 16 | 14,50 | 45 |
| 17 | Pasha, S | Characterizing pelvis dynamics in adolescent with idiopathic scoliosis | 12 B | X | 12,00 | 28 |
| 18 | Mok, NW | Changes in lumbar movement in people with low back pain are related to compromised balance. | 14 B | X | 14,00 | 40 |
| 20 | Scholtes, SA | Differences in lumbopelvic motion between people with and people without low back pain during two lower limb movement tests. | 12 B | 16 | 14,00 | 22 |
| 21 | Kantor, E | Does body stability depend on postural chain mobility or stability area? | 14 C | X | 14,00 | 36 |
| 22 | Cote, KP | Effects of pronated and supinated foot postures on static and dynamic postural stability | 16 C | X | 16,00 | 33 |
| 23 | Krishnamoorthy, V | Effects of different types of light touch on postural sway | 16 C | X | 16,00 | 31 |
| 24 | Milosavljevic, S | Kinematic and temporal interactions of the lumbar spine and hip during extension in healthy male subjects | 16 C | X | 16,00 | 20 |
| 25 | Naito, K | Multijoint kinetic chain analysis of knee extension during the soccer instep kick. | 16 C | X | 16,00 | 25 |
| 26 | Bouisset, S | Postural dynamics in maximal isometric ramp efforts | 16 C | X | 37 | |
| 27 | Berret B, | Modular control of pointing beyond arm’s lenght | 15 B | 15 | 15,00 | 43 |
| 28 | Boulay C, | Sagittal alignment of spine and pelvis regulated by pelvic incidence: standard values and prediction of lordosis | 15 C | X | 15,00 | 29 |
| 29 | Edwards WT | Effect of joint stiffness on standing stability. | 15 C | X | 15,00 | 42 |
| 30 | Runge CF | Ankel and hip postural stratgies defined by joint torques. | 16 C | 16 | 16,00 | 39 |
| 31 | Madigan ML | Postural sway and joint kinematics during quiet standing are affected by lumbar extensor fatigue. | 15 C | X | 15,00 | 38 |
| 32 | Hwang I-S | Postural fluctuations during pointing from a unilateral or bilateral stance | 16 C | X | 16,00 | 41 |
| 33 | Asseman F. | Effect of head position ans visual condition on balance controlin inverted stand | 16 B/C | 14 | 15,00 | 30 |
| 34 | Labelle, H | The importance of spino-pelvic balance in L5-S1 developmental spondylolisthesis | 15 B | X | 15,00 | 27 |
| 36 | Shan G | Full-body kinematic characteristics of the maximal soccer kick by male soccer players and parameters related to kick quality. | 16 C | 16 | 16,00 | 24 |
| 37 | Bouisset S | A sequence of postrural movements preceds voluntary movement. | 10 C | X | 10,00 | 13 |
| 38 | Tateuchi, H | Effects of calcaneal eversion on three-dimensional kinematics of the hip, pelvis and thorax in unilateral weight bearing. | 16 C | 15 | 15,50 | 35 |
| 39 | Hodges, P.W. | Coëxistence of stability and mobility in postural control: evidence from postural compensation for respiration | 16 C | X | 16,00 | 8 |
| gemiddeld | 14,58 | |||||
| totaal | 539,58 | |||||
| aantal | 37 | |||||
| Nr. | Auteur/jaar | Beweging | Keten |
| 1 | Tully, E.A
2005 |
Opstaan | Heup: lwk = 3:1 Thwk beweegt tegengesteld aan lwk |
| 2 | Kuo, Y-L
2010 |
In stand een been heffen | Bijdrage lwk = 26,6% (29,3º) totaal bekken + heup = 110,2° |
| 3 | Li, G
2009 |
Flexie/extensie, lateroflexie en rotatie lwk | Fl/Ext lat.fl rot
L2-3: 5,4°(±3,8°) 2,9°(±2,4°) 2,5°(±2,3°) L3-4: 4,3°(±3,4°) 3,4°(±2,1°) 2,4°(±2,6°) L4-5: 1,9°(±1,1°) 4,7°(±2,4°) 2,9°(±2,1°) |
| 4 | Fayad, F
2008 |
45,60, max abductie & elevatie arm | Elevatie extensie romp + bifas. lat. Flex.
Abductie torsie romp (4-9º) + bifas. Lat. Flex. |
| 5 | Nott, CR
2010 |
Gaan (lopen) | Beschrijft de invloed van enkel, knie en heup op de romp bij gaan en toont dat er gekoppelde beweging in 3 vlakken plaats vindt. |
| 6 | Pal, P
2007 |
Flexie en deflexie van de romp. | Max. hoekstand verandering heup is groter (69,2° ±10,3°) dan lwk (55,9° ±5,8°).
Lwk buigt eerder (na 16,0% ±3,5) dan heup (25,9% ±4,4). Retour resp.: 12,1% ±6,1 en 7,4% ±2,2 Max. hoeksnelheid heup 56,3% ±4,8 en lwk 43,0% ± 7,4 Retour resp.: 36,7% ±7,6 en 41,9% ±6,3 |
| 7 | Takasaki, H
2009 |
0,30,60,90 en 120 º abductie arm in ruglig | Met weerstand (2kg) tot 90º C0 t/m T1 linksom t.o.v. referentielijn 90-120º: C0-C6 rechtsom en C6-T1 linksom Onderling 0-90º re. 90-120º C1,2 re. tov C3 en C3-T1 liZonder weerstand (2kg) geen significantie |
| 8 | Theodoridis, D
2002 |
Elevatie arm in sagittale en scapulaire vlak | Ipsilaterale lat.fl + rot + Ext van T2-T7 bij 23 van 25 pp (sagittaal) en 19 van 25 pp in scapulaire vlak. |
| 9 | Bussey, MD
2009 |
Abductie, exorotatie en abductie+exorotatie heup | Abd. en exo beweging SIG bij 30-40º
Abd+exo beweging SIG bij 20-30º |
| 10 | Scholtes, SA
2009 |
Knieflexie en heupexorotatie | Knieflexie en heupexorotatie hebben invloed op rotatie van lwk/bekken. Bij mensen met rugklachten was de lwk/bekken rotatie groter. |
| 11 | Milosavljevic, S
2008 |
Extensie romp | In elke fase van extensie van de romp heeft de lwk een grotere uitslag en snelheid dan de heup. Ook de retour beweging wordt geïnitieerd door de lwk en eindigt met een over correctie in flexierichting. |
| 12 | Naito, K
2010 |
Voetbal wreeftrap | Gemeten werden driedimensionale data van 8 segmenten met 18 gewrichtsrotaties |
| 13 | Tully EA
1997 |
Vingertop bodem beweging | Heupflexie bleek recht evenredig met de VBA, maar niet met lwk flexie of thoracale beweging. Grote variaties tussen individuen bleek. Bij succesvolle “teenaanrakers” bleek gemiddeld 4°extensie van de thwk, terwijl bij niet succesvolle personen er 4,8° flexie bleek. |
| 24 | Naito, K
2010 |
Voetbalwreeftrap | De relatie tussen spiermoment en krachten werkend op de segmenten in het systeem wordt beschreven. Vervolgens wordt de relatie gelegd tussen spiermoment en gewrichtsbeweging om de meervoudige gewrichtscoördinatie te analyseren en ten derde wordt het verband geanalyseerd tussen een gegeven gewrichtshoek versnelling en de veroorzakende dynamische factoren. |
| 24 | Shan, G
2005 |
Voetbalwreeftrap | Een effectieve voetbaltrap maakt gebruikt van het totale lichaam (full-body) en multigewrichtscoördinatie. De beschrijving aan de hand van gemeten parameters geeft een inzicht in de totale beweging die nodig is om een effectieve trapbeweging te maken. |
Tabel 1. Overzicht onderzoek bewegingsketen (focal chain)
| Nr. | Auteur/jaar | Onderzoek | Uitkomsten |
| 1 | Berthonnaud, E
2005 |
Vorm en oriëntatie van heupen, bekken lwk, thwk en cwk | Vorm en oriëntatie van ieder afzonderlijk anatomisch segment is nauw verbonden met alle andere segmenten teneinde een stabiel houding te handhaven. Hoofd, wervelkolom en bekken kunnen gezien worden als een liniaire keten. |
| 2 | Lecours, J
2008 |
Onderzocht de relatie tussen voetplaatsing, romppositie en asymmetrie van gewicht dragen en kniehoekverandering. | Uit het onderzoek blijkt invloed van de positie van de voet op de oriëntatie van de romp in de ruimte, de kniehoek en de gewichtsverdeling over de voeten. |
| 3 | Pasha, S
2010 |
Onderzocht de relatie tussen bekkenstand en vorm van de wervelkolom. | Bekkenstand speelt een essentiële rol in de beweging van de wervelkolom in 3 vlakken. Niet de bewegingsuitslag, maar de bewegingskarakteristiek wordt door de bekkenstand beïnvloed. Skelet asymmetrie (bv schacht-halshoek femur) beïnvloed eveneens de stand en beweging van het bekken. |
| 4 | Kantor, E
2001 |
Onderzoek naar de relatie tussen houdingsstabiliteit en de grootte van het steunvlak. | Houdingsstabiliteit is gerelateerd aan de mobiliteit van de houdingsketen en van het oppervlak van het steunvlak. Bekken en thorax bewegen tegengesteld aan elkaar bij zitten en vertonen geen duidelijk patroon in stand. |
| 5 | Hodges, PW
2002 |
Onderzocht het tegelijk optreden van stabiliteit en mobiliteit bij houdingscontrole als compensatie bij ademhaling. | Onderzoek naar de relatie tussen benen, bekken romp en nek bij het compenseren van de balansverstoring door ademhaling, waarbij bleek dat hierbij de stabiliteit afhankelijk was van het bewegen van meerdere lichaamssegmenten. |
| 6 | Cote, KP
2005 |
Onderzocht de relatie tussen voetstand en handhaving van het evenwicht. | Er bleek geen duidelijk verschil tussen voetstand en houdingsevenwicht. Er was wel enig verschil in dynamisch bereik (bewegingsrange) bij verschillende voettypes. |
| 7 | Boulay C,
2006 |
Onderzocht verschillende bekkenparameters en de invloed op de wervelkolom. | Het onderzoek legt een relatie tussen hellingshoek van het sacrum, bekken kanteling (=incidentiehoek van het sacrum) en de lordose van de lwk, samen met kyfose en kanteling van Th9 |
| 8 | Asseman F.
2005 |
Deze studie analyseerde het effect van hoofd positie en visuele controle op de balans in hand stand. | Verschillende posities van het hoofd bij handstand gaven verschillende bewegingsuitslagen van de voeten t.o.v. het hoofd. Bij gesloten ogen nam de bewegingsuitslag in alle posities toe m.u.v. maximale flexiestand van het hoofd. |
| 9 | Labelle, H
2005 |
Onderzoek naar de invloed van de parameters bekken incidentie, sacrale hellingshoek, bekken kanteling, L5 incidentie hoek, lumbosacrale hoek op de vorm van de wervelkolom. | In het sagittale vlak kunnen bekken en wervelkolom beschouwd worden als een open keten verbinding tussen bekken en hoofd, waarbij de vorm en oriëntatie van elk opvolgend anatomisch segment nauw verbonden is aan de aanliggende delen. Verandering van vorm en/of oriëntatie van een deel van de keten heeft dan ook direct effect op de rest van de keten. |
| 10 | Bruijn, SM
2008 |
Onderzoek naar de relatie tussen loopsnelheid, paslengte, bekken- en thoraxrotatie. | De armzwaai compenseert het grootste deel van de hoekstand verandering van het lichaam bij toenemende snelheid. De bekkenrotatie is bij lage snelheid uit fase en bij toenemende snelheid (en paslengte) in fase(boven 3 km/u) met de beenzwaai, maar gaat vooraf aan de beenzwaai. De thorax roteerde uit fase bij alle snelheden. Er was geen significant effect van snelheid op het totale lichaamshoek stand verandering, wat betekent dat de beweging van de benen meer wordt gebalanceerd door armbeweging dan door bekken en romprotatie. |
| 11 | Krishnamoorthy, V
2002 |
Onderzoek naar houdingsstabiliteit onder verschillende test omstandigheden. | De houdingsstabiliteit bleek te worden beïnvloed door visuele controle. Ondersteuning van hoofd en nek bleek effectiever dan steunen met een vinger. Met de vinger gefixeerd in een klip bleek de stabiliteit groter dan zonder. Ondersteuning aan de voorzijde van het lichaam bleek effectiever dan aan de zijkant.
Er bleek geen duidelijk verschil wanneer een gewicht van 3kg in een hand werd gehouden. Ondersteuning leidde ook hier tot verbeterde stabiliteit. Wanneer het gewicht indirect werd vastgehouden via een pulley systeem, bleek de zwaaireductie veel minder bij ondersteuning met een vinger. |
| 12 | Tateutchi, H
2011 |
Onderzoek naar het effect van everteren van de calcaneus op de 3 dimensionale dynamica van heup[, bekken en thorax. | Door middel van een wig werd de calcaneus 5° resp. 10° in eversie gebracht, waarna het effect bij staan op een been bestudeerd werd op de positie van heup, bekken en thorax in 3 vlakken. Er bleek significante vergroting van heupflexie en -endorotatie, vooroverkanteling van het bekken en lateroflexie en axiale rotatie van de thorax naar de kant van het standbeen. In het frontale vlak bleek bekkenkanteling naar de kant van het standbeen af te nemen bij 5° eversie en toe te nemen bij 10°. De booghoogte van de voet van het standbeen correleerde negatief met de axiale rotatie. |
Tabel 2: Overzicht onderzoek houdingsketens (postural chains)